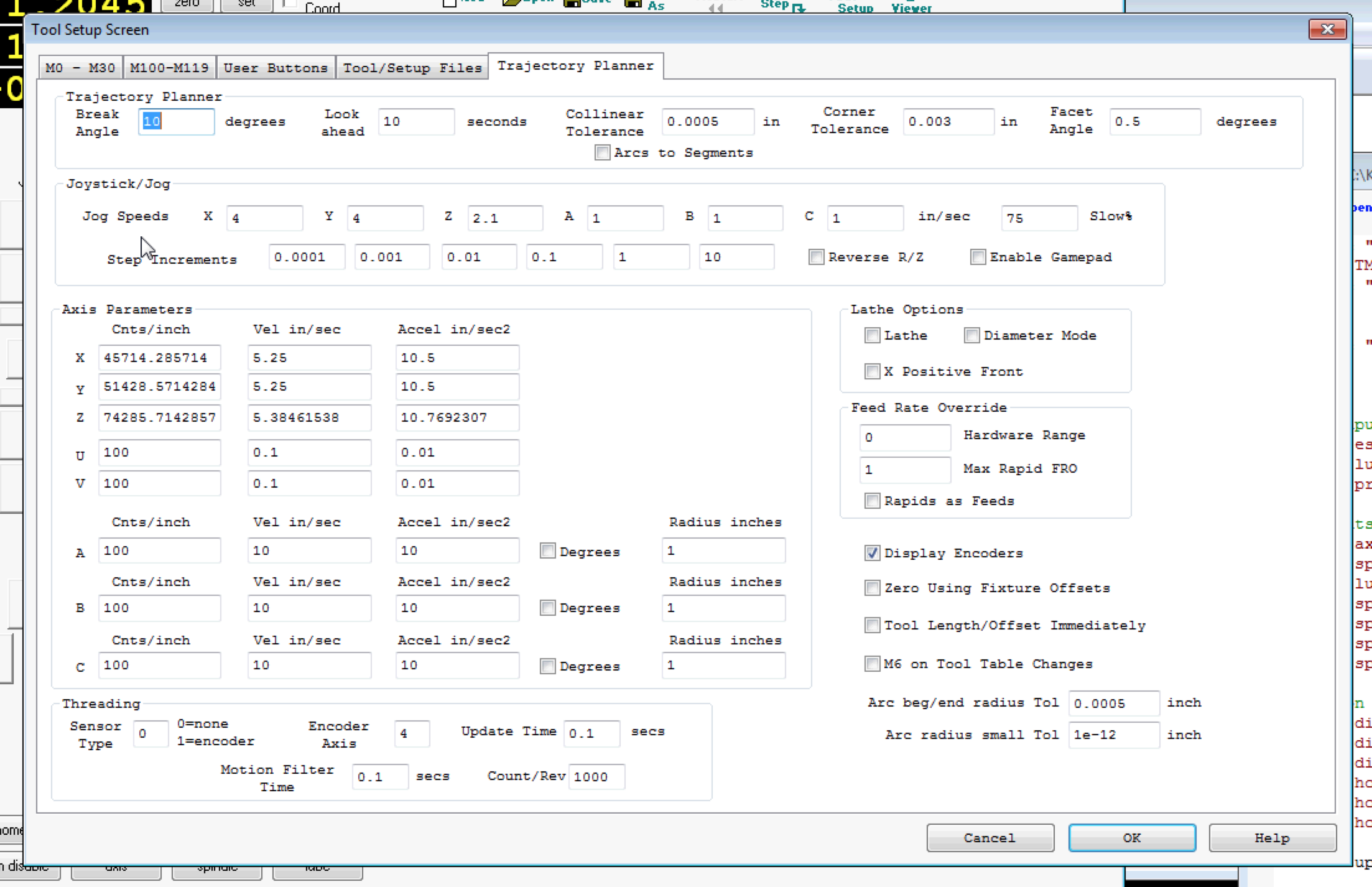
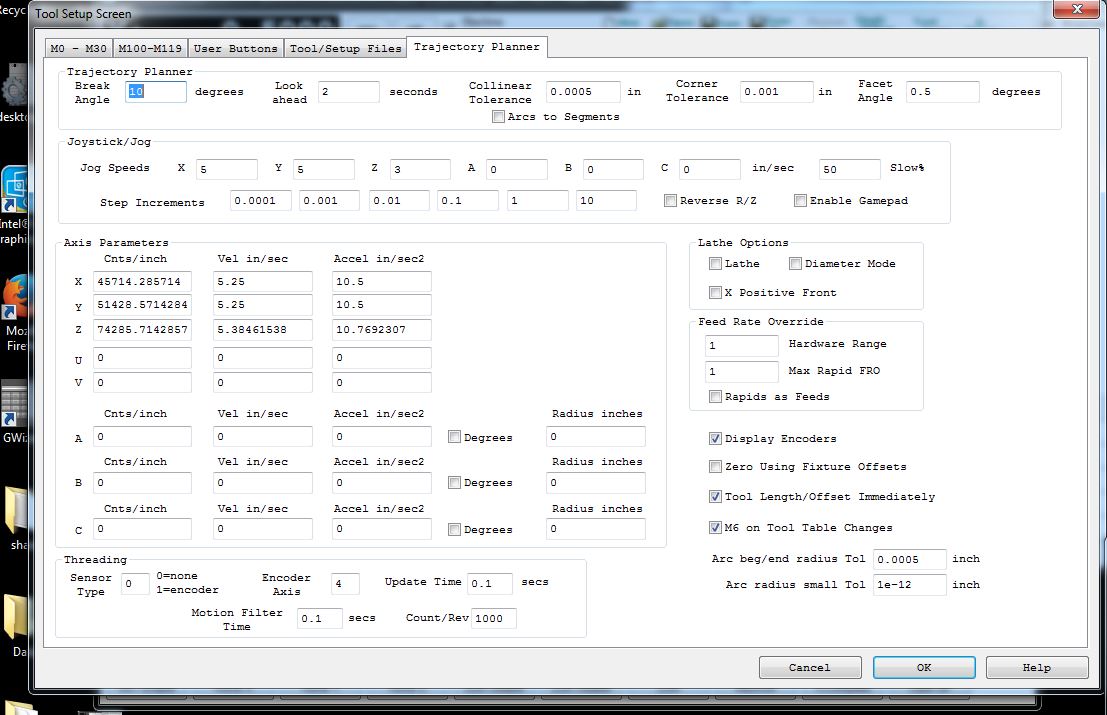
Init settings are below, screenshot is attached.
#define x 0
#define y 1
#define z 2
// limits
#define maxy 4*130000
#define miny 0
#define maxz 0
#define minz 4*-80000
#define maxx 4*180000
#define minx 0
//lim switches
#define estop 136
#define zlim_dn 142
#define zlim_up 143
#define xlim 141
#define ylim 140
DefineCoordSystem(x,y,z,-1);
FPGA(STEP_PULSE_LENGTH_ADD)= 32 ;
ch0->InputMode=ENCODER_MODE;
ch0->OutputMode=CL_STEP_DIR_MODE;
ch0->Vel=4*60000;
ch0->Accel=4*120000;
ch0->Jerk= 4*1200000;
ch0->P=0;
//ch0->I=0.0001;
ch0->I=0;
ch0->D=0;
ch0->FFAccel=0;
ch0->FFVel=0;
ch0->MaxI=300;
ch0->MaxErr=256;
ch0->MaxOutput=300;
ch0->DeadBandGain=0;
ch0->DeadBandRange=2;
ch0->InputChan0=0;
ch0->InputChan1=0;
ch0->OutputChan0=20;
ch0->OutputChan1=1;
ch0->MasterAxis=-1;
ch0->LimitSwitchOptions=0x11f;
ch0->LimitSwitchNegBit=xlim;
ch0->LimitSwitchPosBit=xlim;
ch0->SoftLimitPos=maxx;
ch0->SoftLimitNeg=minx;
ch0->InputGain0=-1;
ch0->InputGain1=0;
ch0->InputOffset0=0;
ch0->InputOffset1=0;
ch0->OutputGain=1;
ch0->OutputOffset=0;
ch0->SlaveGain=1;
ch0->BacklashMode=BACKLASH_LINEAR;
ch0->BacklashAmount=33.5;
ch0->BacklashRate=2000;
ch0->invDistPerCycle=0;
ch0->Lead=0;
ch0->MaxFollowingError=256;
ch0->StepperAmplitude=20;
ch0->iir[0].B0=1;
ch0->iir[0].B1=0;
ch0->iir[0].B2=0;
ch0->iir[0].A1=0;
ch0->iir[0].A2=0;
ch0->iir[1].B0=1;
ch0->iir[1].B1=0;
ch0->iir[1].B2=0;
ch0->iir[1].A1=0;
ch0->iir[1].A2=0;
ch0->iir[2].B0=0.000768788;
ch0->iir[2].B1=0.00153758;
ch0->iir[2].B2=0.000768788;
ch0->iir[2].A1=1.92076;
ch0->iir[2].A2=-0.923833;
ch1->InputMode=ENCODER_MODE;
ch1->OutputMode=CL_STEP_DIR_MODE;
ch1->Vel=270000;
ch1->Accel=540000;
ch1->Jerk= 5400000;
ch1->P=0;
ch1->I=0.0001;
ch1->D=0;
ch1->FFAccel=0;
ch1->FFVel=0;
ch1->MaxI=300;
ch1->MaxErr=256;
ch1->MaxOutput=300;
ch1->DeadBandGain=0;
ch1->DeadBandRange=2;
ch1->InputChan0=3;
ch1->InputChan1=0;
ch1->OutputChan0=21;
ch1->OutputChan1=0;
ch1->MasterAxis=-1;
ch1->LimitSwitchOptions=0x11f;
ch1->LimitSwitchNegBit=ylim;
ch1->LimitSwitchPosBit=ylim;
ch1->SoftLimitPos=maxy;
ch1->SoftLimitNeg=miny;
ch1->InputGain0=-1;
ch1->InputGain1=0;
ch1->InputOffset0=0;
ch1->InputOffset1=0;
ch1->OutputGain=1;
ch1->OutputOffset=0;
ch1->SlaveGain=1;
ch1->BacklashMode=BACKLASH_LINEAR;
ch1->BacklashAmount=61;
ch1->BacklashRate=2000;
ch1->invDistPerCycle=0;
ch1->Lead=0;
ch1->MaxFollowingError=256;
ch1->StepperAmplitude=20;
ch1->iir[0].B0=1;
ch1->iir[0].B1=0;
ch1->iir[0].B2=0;
ch1->iir[0].A1=0;
ch1->iir[0].A2=0;
ch1->iir[1].B0=1;
ch1->iir[1].B1=0;
ch1->iir[1].B2=0;
ch1->iir[1].A1=0;
ch1->iir[1].A2=0;
ch1->iir[2].B0=0.000769;
ch1->iir[2].B1=0.001538;
ch1->iir[2].B2=0.000769;
ch1->iir[2].A1=1.92081;
ch1->iir[2].A2=-0.923885;
ch2->InputMode=ENCODER_MODE;
ch2->OutputMode=CL_STEP_DIR_MODE;
ch2->Vel= 400000;
ch2->Accel=800000;
ch2->Jerk= 8000000;
ch2->P=0;
//ch2->I=0.0001;
ch2->I=0;
ch2->D=0;
ch2->FFAccel=0;
ch2->FFVel=0;
ch2->MaxI=300;
ch2->MaxErr=256;
ch2->MaxOutput=300;
ch2->DeadBandGain=0;
ch2->DeadBandRange=2;
ch2->InputChan0=2;
ch2->InputChan1=0;
ch2->OutputChan0=22;
ch2->OutputChan1=0;
ch2->MasterAxis=-1;
ch2->LimitSwitchOptions=0x11f;
ch2->LimitSwitchNegBit=zlim_dn;
ch2->LimitSwitchPosBit=zlim_up;
ch2->SoftLimitPos=maxz;
ch2->SoftLimitNeg=minz;
ch2->InputGain0=1;
ch2->InputGain1=0;
ch2->InputOffset0=0;
ch2->InputOffset1=0;
ch2->OutputGain=-1;
ch2->OutputOffset=0;
ch2->SlaveGain=1;
ch2->BacklashMode=BACKLASH_LINEAR;
ch2->BacklashAmount=61;
ch2->BacklashRate=2000;
ch2->invDistPerCycle=0;
ch2->Lead=0;
ch2->MaxFollowingError=256;
ch2->StepperAmplitude=20;
ch2->iir[0].B0=1;
ch2->iir[0].B1=0;
ch2->iir[0].B2=0;
ch2->iir[0].A1=0;
ch2->iir[0].A2=0;
ch2->iir[1].B0=1;
ch2->iir[1].B1=0;
ch2->iir[1].B2=0;
ch2->iir[1].A1=0;
ch2->iir[1].A2=0;
ch2->iir[2].B0=0.056495;
ch2->iir[2].B1=0.112989;
ch2->iir[2].B2=0.056495;
ch2->iir[2].A1=1.22565;
ch2->iir[2].A2=-0.451634;
{kind=link}
{kind=link}
.JPG){kind=link}